组会简讯:2026年秋季第5次组会
2026年3月31日,课题组举行了线下大组会,指导老师唐克双教授、朱宏副教授,课题组全体成员参与了本次例会。本次组会主要内容为骆旅舟同学、saani同学的研究进展汇报。
一、骆旅舟研究进展汇报
骆旅舟同学围绕其研究进展“MPC+RL for Network Traffic Signal Control”进行了汇报。
(1)介绍了面向城市路网交通信号控制的问题建模与总体研究框架,指出在大规模路网场景下,交通控制面临不确定性强、部分可观测以及多交叉口协同困难等挑战,并据此提出了由下层分布式模型预测控制与上层强化学习策略组成的分层控制思路;
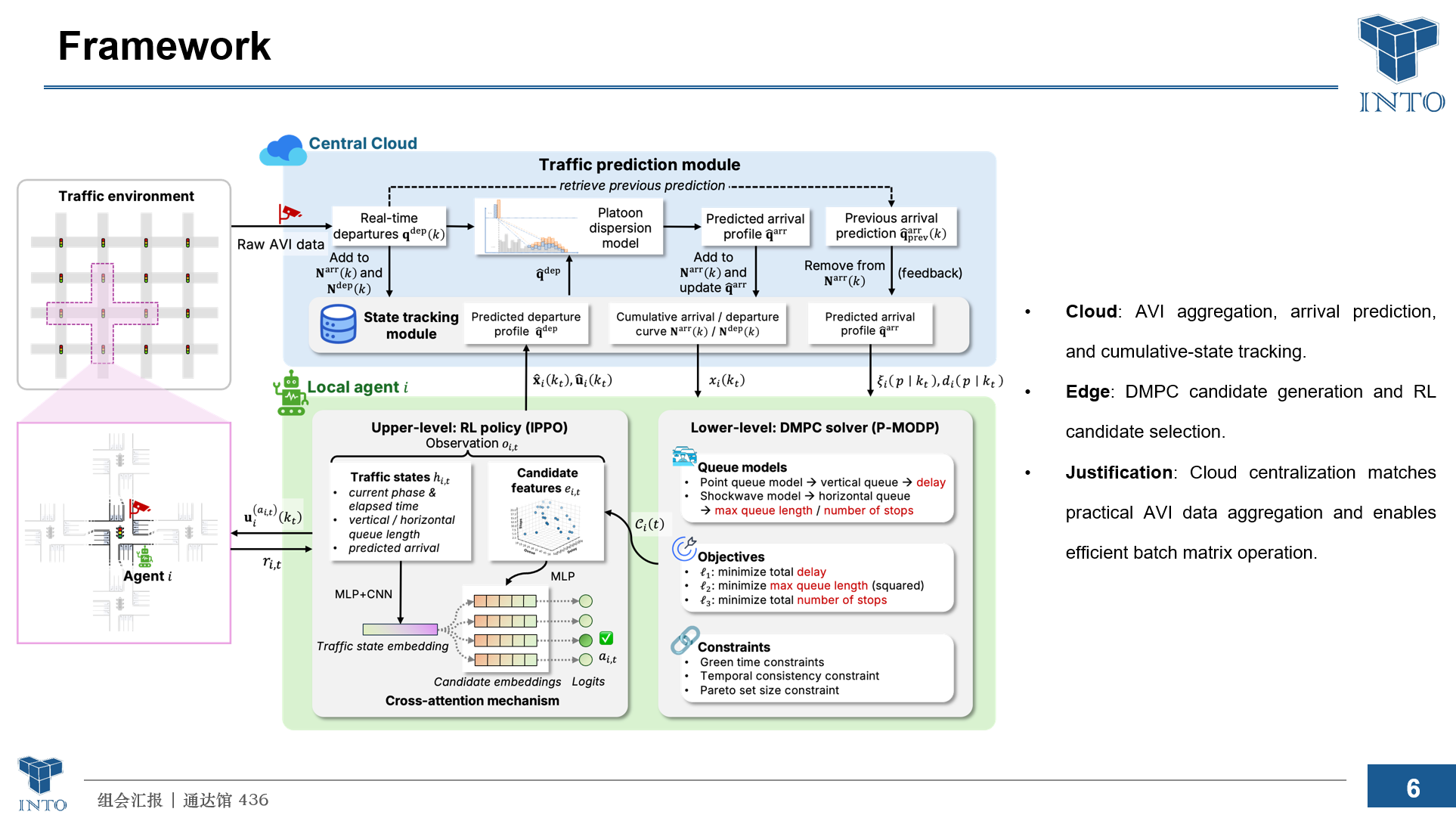
(2)重点汇报了云侧与边侧协同的整体架构设计,其中云侧负责AVI数据汇聚、到达流预测与累计状态跟踪,边侧负责候选控制方案生成与强化学习决策选择;在下层控制器设计方面,进一步介绍了基于垂直排队与水平排队联合刻画的队列动态建模方法、多目标阶段代价函数设计以及剪枝多目标动态规划求解思路;在上层智能体设计方面,说明了观测空间、动作空间、奖励函数以及注意力机制策略网络与价值网络的构建方式;
(3)展示了在连云港路网仿真场景下的实验结果。结果表明,所提出的 IPPO-DMPC 方法在平均节点总延误、平均旅行时间、平均等待时间、平均停车次数等指标上均优于固定配时、感应控制、纯强化学习和纯 DMPC 等对比方法,同时还进一步开展了关于目标函数组合、自注意力模块、预测时域和动作空间大小的消融与敏感性分析。唐老师、朱老师和课题组成员对该研究的整体思路与阶段性结果给予了肯定,并围绕测试流量设置、基线方法补充以及约束条件的进一步优化等方面提出了宝贵建议。
二、Saani研究进展汇报
Saani同学的研究聚焦于城市快速路交通拥堵的识别、分类与预测。研究动因源于日益严峻的城市交通拥堵问题 —— 该问题不仅导致出行延误、经济成本上升,还会加剧环境污染并带来交通安全隐患。本研究明确指出现有文献存在的关键空白:绝大多数模型未能明确区分常发性拥堵(可预测、基于规律模式,约占拥堵总案例的 45%)与偶发性拥堵(由突发事件触发、不可预测,约占 55%),且难以有效处理二者混合存在的非线性时空动力学特征。
针对上述问题,该研究提出由三个相互关联模块构成的整体研究框架:1.因果感知框架:采用 PC 算法、贪婪等价搜索(GES)、传递熵等因果发现方法,通过构建有向无环图(DAG)揭示并区分不同类型拥堵的形成机制;2.可解释深度学习模型:融合图神经网络、循环神经网络与多头注意力机制,实现常发性拥堵的高精度、可解释预测;3.事件感知动态图框架:针对偶发性拥堵预测,能够在路网发生中断时实时自适应调整路网拓扑结构。