文章标题:考虑多车道场景超车行为的车牌识别数据排队长度概率估计方法
已见刊于:Transportation Research Part C. 第 173 卷,pp. 105029.
https://doi.org/10.1016/j.trc.2025.105029
作者:骆旅舟,吴浩,刘家豪,唐克双 *, 谈超鹏
关键词:交通工程;排队长度估计;车牌识别数据;无延误到达时间;多车道超车;概率模型
排队长度是信号控制交叉口反映供需关系与协调质量的核心参数之一,准确的车道级排队长度估计能够有效支撑信号控制优化,提升路网通行效率。近年来,多断面车牌识别(LPR)数据逐渐成为车道级排队长度估计的重要数据源,可同时提供输入输出流量信息与采样行程时间,为排队状态感知提供了丰富的数据支撑。然而,现有基于车牌识别数据的排队长度估计研究大多依赖先入先出(FIFO)规则和均匀到达过程等强假设,无法捕捉多车道场景的复杂性,尤其是难以处理超车行为与交通流波动带来的影响,导致估计结果与真实交通状态存在较大偏差。
现有方法尚未有效解决多车道场景下考虑超车行为的排队长度准确估计问题。因此,本研究面向多断面车牌识别数据环境,提出一种考虑超车行为的概率型排队长度估计方法,放松传统方法的强假设以适配真实复杂交通场景,并通过仿真和实证验证,对比分析了本文方法与现有同类方法的优劣,以及本文方法在不同交通与数据条件下的估计精度和鲁棒性。
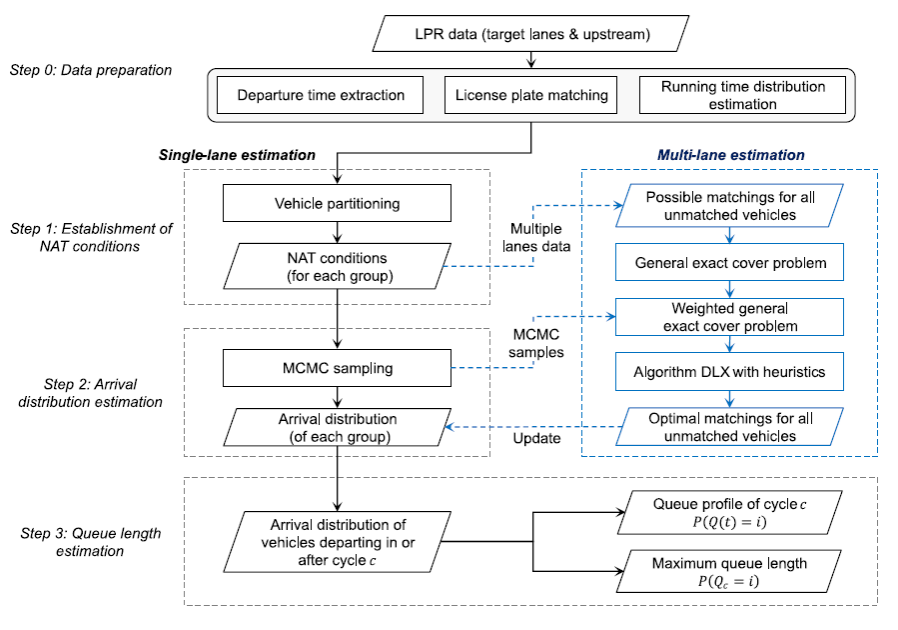
图1 研究方法框架
本研究的方法流程如图 1 所示。首先,基于上下游断面的车辆离开时间与通行序列,建立所有车辆的无延误到达时间(NAT,即车辆未经历任何排队延误的理论到达时间)的判定条件。为了降低计算维度与复杂度,本研究开发了基于动态规划(DP)的车辆分组算法,基于车辆间的潜在交互关系完成车辆组的划分,以此简化后续的概率计算过程。然后,推导每个车辆组的无延误到达时间的条件概率,并采用马尔可夫链蒙特卡洛(MCMC)采样方法完成该概率的求解。在此基础上,基于车辆的无延误到达时间估计结果,即可推导得到每个信号周期的随机排队过程与最大排队长度。最终,本研究将该方法扩展到多车道场景,将多车道排队长度估计问题转化为带权的广义精确覆盖问题,通过带启发式的回溯算法完成求解,实现了多车道联合的排队长度估计。
本研究分别在仿真场景和实证场景下对所提出方法进行了效果验证。其中,仿真实验测试了不同流量 V/C 比、数据匹配率、漏检率以及 FIFO 违规率等多种条件下的方法表现,选取同类型的经典排队长度估计方法作为基线方法进行效果对比。不同条件下本文提出的概率方法与对比的基线方法的精度如图 2 所示。
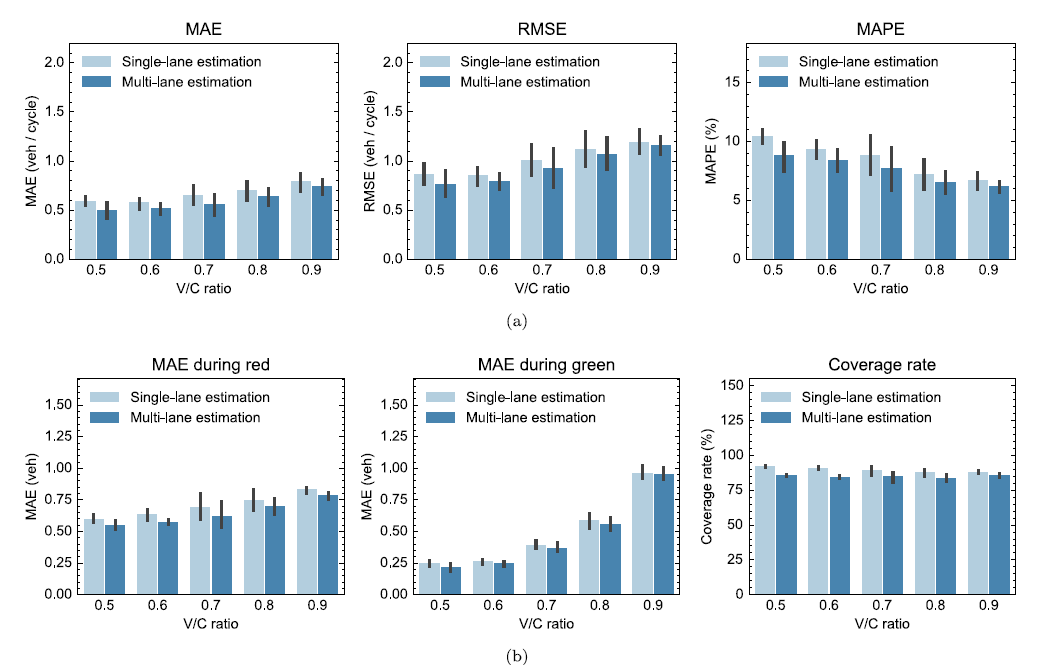
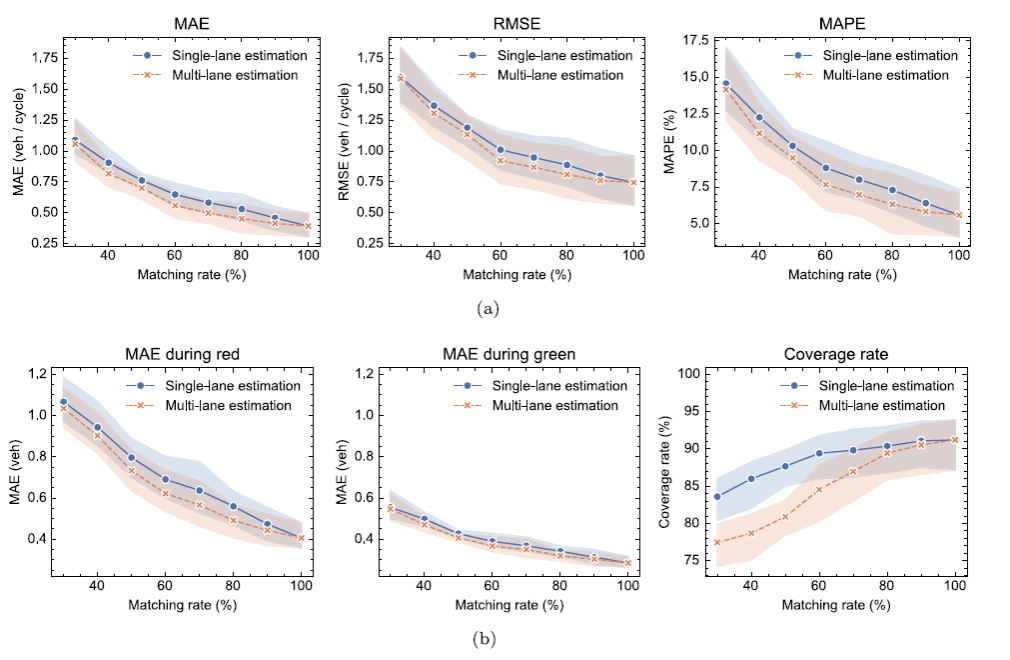
图2 不同交通与数据条件下 2 种方法估计误差结果对比
由仿真结果可见:本方法在所有测试场景下均显著优于基线方法。即便在数据匹配率低至 30% 的极端条件下,本方法的估计精度仍优于基线方法在 80% 匹配率下的表现;当漏检率达到 20% 时,本方法仍能保持可用的估计精度,展现出极强的鲁棒性。同时,多车道联合估计的效果始终优于单车道独立估计,尤其是在红灯相位和中等 V/C 比场景下,优势更为显著。此外,本方法还能提供估计结果的置信区间,为交通状态感知提供了不确定性信息,支撑更稳健的信号控制决策。
实证场景验证地点为常州市晋陵路 — 太湖路交叉口,研究对象为南进口道 2 条直行车道,如图 3 (a)、(b) 所示。车牌识别数据采集自该交叉口的多断面检测设备,真实的交通状态通过人工校验的方式提取,用于验证估计结果的准确性。
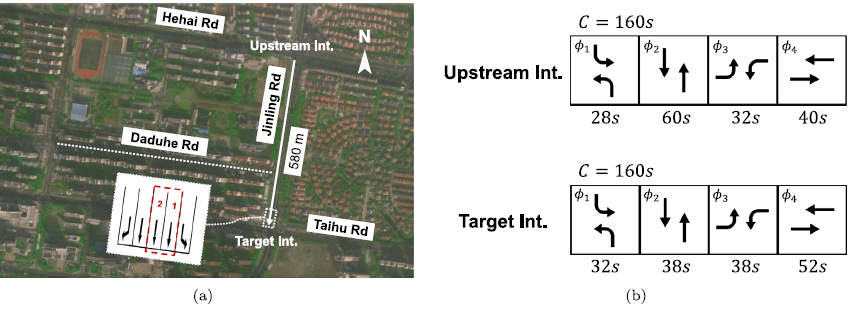
图 3 实证交叉口
实证场景的估计结果显示,本提出的概率方法在所有评价指标上相比基线方法实现了超过 37% 的提升,大部分周期的估计误差小于 1 辆车,最大误差不超过 4 辆车。同时,本方法估计得到的高分辨率排队过程还可有效支撑信号控制的相位差优化,相比传统基于固定排队状态的优化方法,实现了 6.63% 的车辆延误降低,验证了本方法在实际信号控制优化中的应用价值。
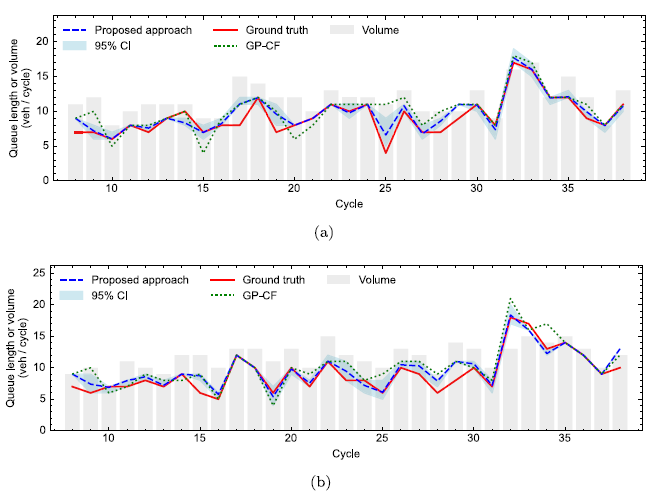
图 4 不同匹配率下周期排队长度估计结果
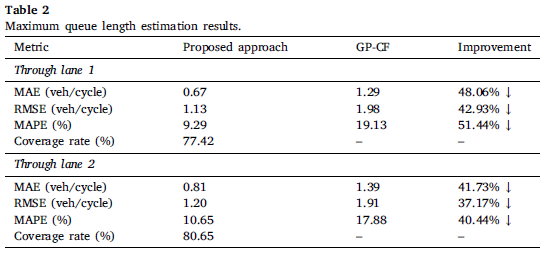
实证场景的平均结果如表 1 所示。由表 1 可知:总体上,本研究提出的方法在各项评价指标上均显著优于基线方法,展现出更高的估计精度与鲁棒性。
表 1 实证结果对比
本研究的主要学术贡献在于:①在基于车牌识别数据的排队长度估计中,首次充分考虑了多车道场景下的超车行为及其对其他车辆的潜在影响,放松了现有研究普遍采用的 FIFO 规则和特定到达过程假设,能够更好地适配真实复杂的交通运行场景;②不同于现有研究将各车道独立处理的局限,本方法可实现完整的多车道联合排队长度估计,能够充分利用车牌识别数据中的全部信息,包括现有方法无法处理的未匹配车辆数据,有效提升了数据的利用率;③提出的概率估计方法不仅能够实现高分辨率的排队过程估计,还能提供估计结果的置信区间,在实证与仿真场景中均展现出比现有方法更高的精度与鲁棒性,同时估计得到的排队状态可有效支撑信号控制优化,实现了通行效率的可感知提升。

