作者:Keshuang Tang , Yanqing Xu , Fen Wang,Takashi Oguchi
已见刊于:Accident Analysis & Prevention,Volume 95, Part B,2016,Pages 470-478,https://doi.org/10.1016/j.aap.2016.01.011.
关键词:Flashing green、High-speed intersections、Stop-go decision behavior、Fuzzy Logic、Dilemma Zone
在中国,许多城市通常在信号灯交叉口使用闪烁的3 秒绿色指示和随后的3秒黄色指示来结束绿灯阶段。可以理解的是,黄色时间的长度通常太短,以至于无法让驾驶员避开高速路口的两难区(DZ),在中国,通常将速度限制设置在60km / h以上。同时,使用闪烁的绿色可能会更有效地影响驾驶员在相变时的走走行为,从而对交叉路口安全性产生更大的影响。
本文在上海的四种典型的高速交叉路口中,共收集了186条高分辨率的车辆轨迹,用于识别实际的停车决策区域和建模决策行为。
表1 交叉口现场条件和样本大小的摘要

根据在开始闪烁绿色和黄色时到达停止线的潜在时间,即TTS FG和TTS Y,定义了四种类型的走走停停操作,即正常停车(NS),正常停车(NP),积极停车(AP)和保守停车(CS),以对整个驾驶员群体进行分类。NS是指驾驶员在潜在时间大于闪烁绿色或黄色的开始时间与结束绿色之间的时间差时决定停止的行为,同样,即使驾驶员决定停止行驶,也将其视为CS驾驶员的潜在时间小于时差;NP表示当潜在时间小于闪烁绿色或黄色的开始时间与绿色结束之间的时间差时驾驶员选择通过的行为,而AP定义为驾驶员在相同条件下选择通过的行为。
绿闪的存在显着增加了CS,同时略微诱发了AP。停走类型的这种改变可能导致与传统理论中所假设的决策区域不同的决策区域。然后对闪烁的绿色和黄色开始时AP车辆的最大通过距离(X C)和CS车辆的最小停止距离(X S)进行回归分析,以制定实际的决策区域。图1(a)和(b)中的实线图指示了在闪烁的绿色和黄色开始时用于X S和X C的回归分析中的AP和CS样品载体。
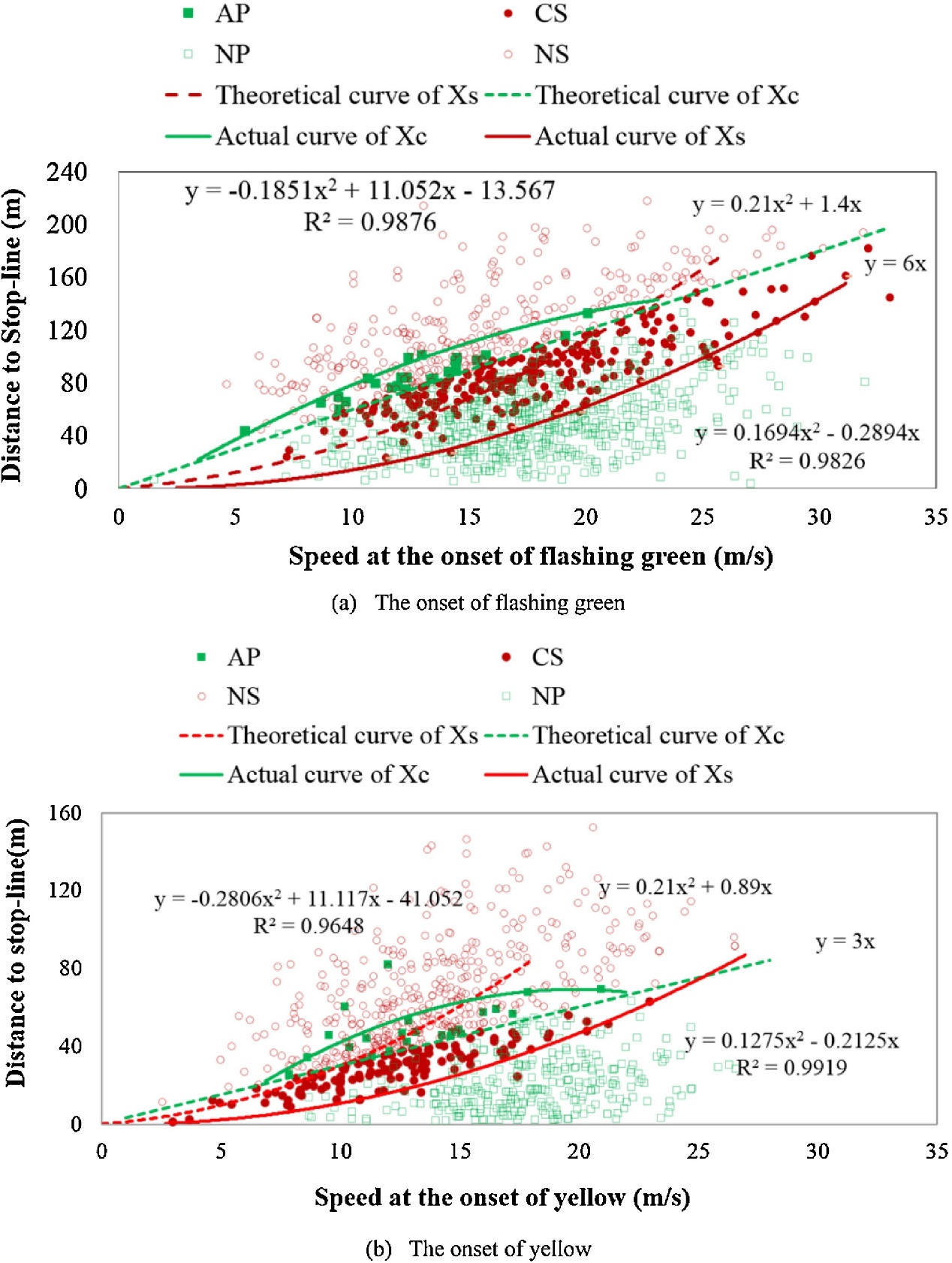
图1 速度-距离图中停走决策类型的分布
为了更好地说明的理论和实际的决定区域的差异,图2还指定基于理论和实际的那些决定区。事实表明,以确定性决策过程为基本假设的传统理论可能难以捕捉绿色信号闪烁且黄色时间不足的农村高速路口的驾驶员走走停停决策行为的性质。

图2 理论决策区和实际决策区的比较
以上分析表明,驾驶员在绿色和黄色闪烁时的走走停停决策行为相当复杂,由于其基本假设的局限性,传统的GHM模型很难完全解释。因此,本文又寻找了一种可行的建模方法来解释这种停停决策行为。其比较了二进制逻辑模型和模糊逻辑模型,以进一步探究绿色闪烁对驾驶员的走走停停行为的影响。发现与传统的二进制逻辑模型相比,模糊逻辑模型可以产生相当好的估计结果。
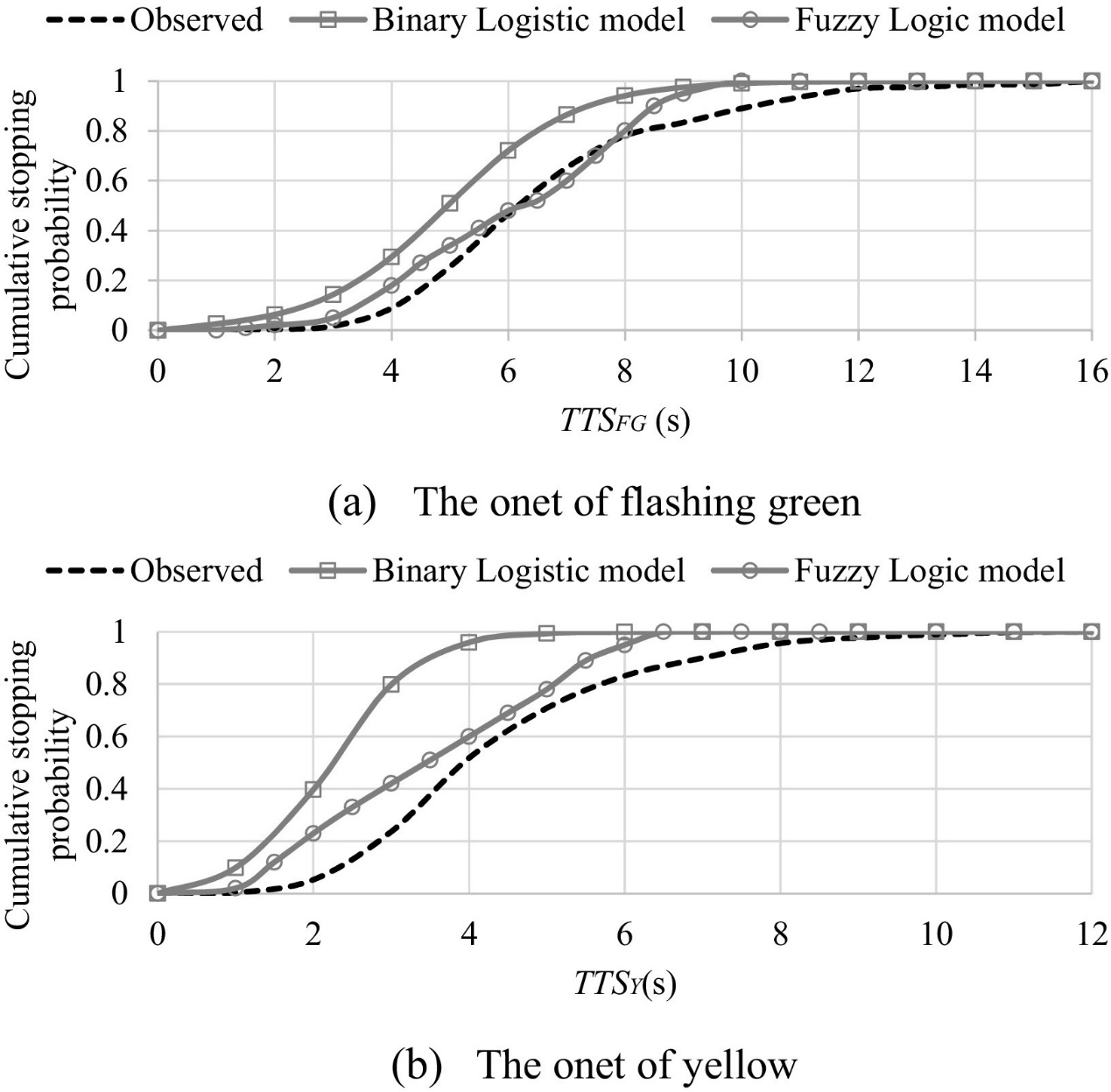
图3 模型性能比较

