
本团队致力于智能交通系统领域的研究,主要研究方向包括:
1. 数据驱动的城市道路交通时空连续认知
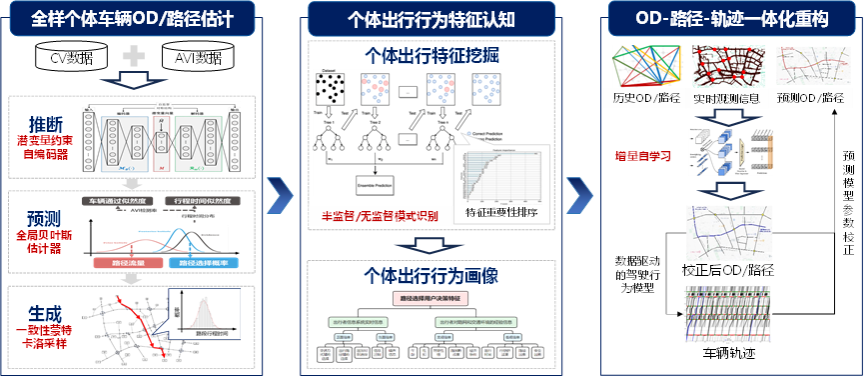
针对基于断面集计感知数据的传统信息监测技术难以精细刻画个体车辆出行时空连续需求分布及其运行特征的问题,该研究方向旨在通过整合多源的路网交通监测数据(包括车辆身份识别、网联车等),采用数理推断、概率建模、深度学习等研究方法,对被捕捉的个体出行过程进行特征挖掘、行为画像和动作推理,实现对城市路网的交通状态评估、致因分析诊断和机理演化预测。同时,通过对城市路网交通状态演化过程的一体化建模,实现对个体轨迹、路径流量和OD信息的一致性推理,为自适应信号控制、车道管理和拥堵识别等精细化交通管理应用提供科学依据。
相关支撑项目:
国家重点研发计划项目“自主式交通系统计算技术”课题四“自主式交通系统跨域计算与决策优化”(2023YFB4301904),2023年12月~2025年11月;
国家重点研发计划-战略性科技合作项目“人工智能和数字孪生混合驱动的交通信号控制评估-诊断-优化关键技术”(2023YFE0209300),2024年1月~2025年12月;
国家自然科学基金委项目“基于关键路径的区域协调信号控制理论与方法”(52372319),2024年1月~2027年12月;
中船杰瑞电子有限公司委托项目“基于车辆身份识别数据的城市道路车辆OD-路径-轨迹一体化重构技术”,2023年8月~2024年12月。
2. 人工智能和数字孪生驱动的交通信号控制评估、诊断与优化
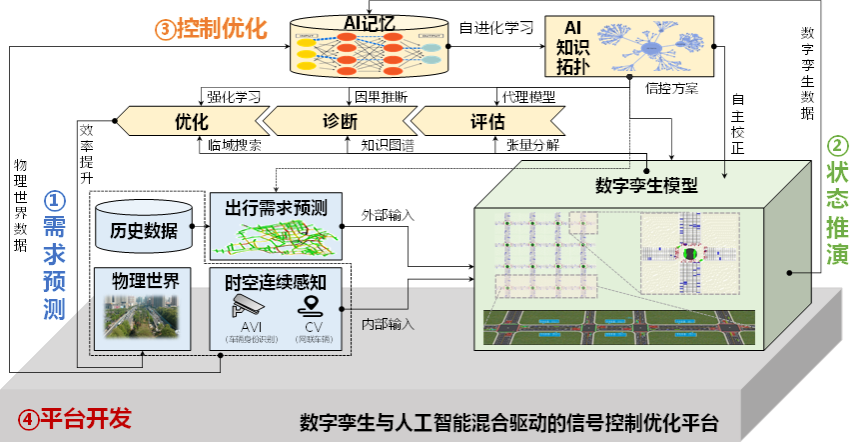
传统信控技术在城市路网信号控制问题上面临着高维复杂系统难优化的挑战,该研究方向聚焦“大规模非线性复杂信控系统人机混合智能优化机理”科学问题,融合车辆身份识别、网联车辆轨迹等车辆出行时空连续感知数据,利用研究方向(一)中重构所得的OD、路径、轨迹等高价值信息,利用知识图谱、代理模型、强化学习等方法,重点突破人工智能、数字孪生技术在信号控制深度应用中的“可解释性和可移植性差、孪生误差难校准”的技术瓶颈,构建人机混合智能驱动的大规模路网信号控制评估-诊断-优化技术闭环。
相关支撑项目有:
国家重点研发计划-战略性科技合作项目“人工智能和数字孪生混合驱动的交通信号控制评估-诊断-优化关键技术”(2023YFE0209300),2024年1月~2025年12月;
国家自然科学基金委员会-青年科学基金项目“面向分布式干线协调信号控制的多智能体博弈机制与自适应优化方法研究”(52302414),2024年1月~2026年12月;
3. 自主式交通系统跨域计算与决策优化
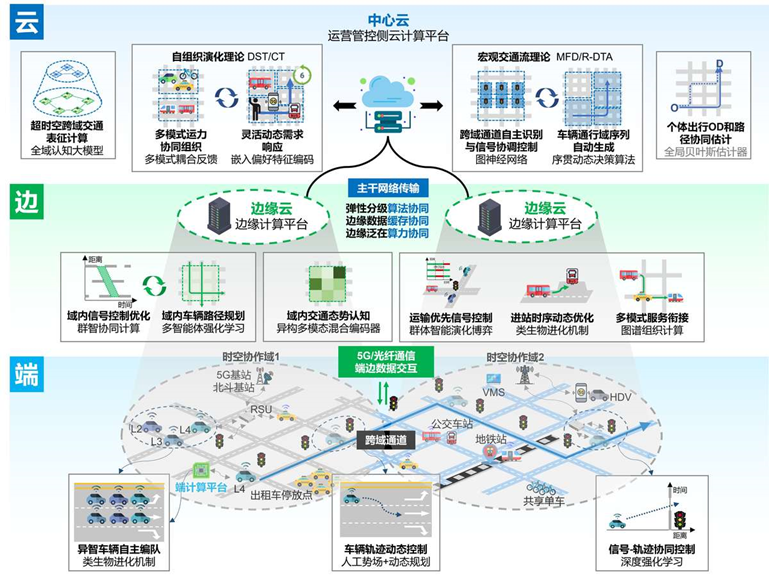
针对自主式交通系统(ATS)在跨域计算中面临域间交互关系复杂、跨域系统推演困难以及决策响应不一致等挑战,本研究方向包括多项创新性研究。首先,将开发多模态融合的域内交通与超时空关联的跨域交通表征计算方法,并构建云边端协同的多方式ATS全域认知大模型。其次,计划研究感知数据的推理补齐方法以及跨方式、跨域交通个体出行OD-路径一体化的孪生推演计算技术。此外,将探索跨方式出行服务的在线优化方法,开发跨网跨链的多模式供需匹配计算技术,并提出多方式出行一体化自组织跨域服务决策计算方法。同时,研究时空协作域自组织理论和多方式异构智能系统的自主闭环跨域管控决策优化模型。最后,拟研制运营管控侧的云计算平台,并开展虚实融合的测试与验证工作。通过这些研究,旨在提升自主式交通系统在复杂跨域环境下的计算能力、决策一致性和整体运营效率。
相关支撑项目有:
国家重点研发计划项目“自主式交通系统计算技术”课题四(2023YFB4301904),2023年12月~2025年11月;
国家重点研发计划项目“自主式交通系统计算技术”课题五·专题二(2023YFB4301905-02),2024年1月~2026年11月;
国家重点研发计划项目“自主式交通系统互操作技术”课题一·专题二(2022YFB4300401-02),2023年7月~2025年11月。
4. 城市道路交通自主协同调控
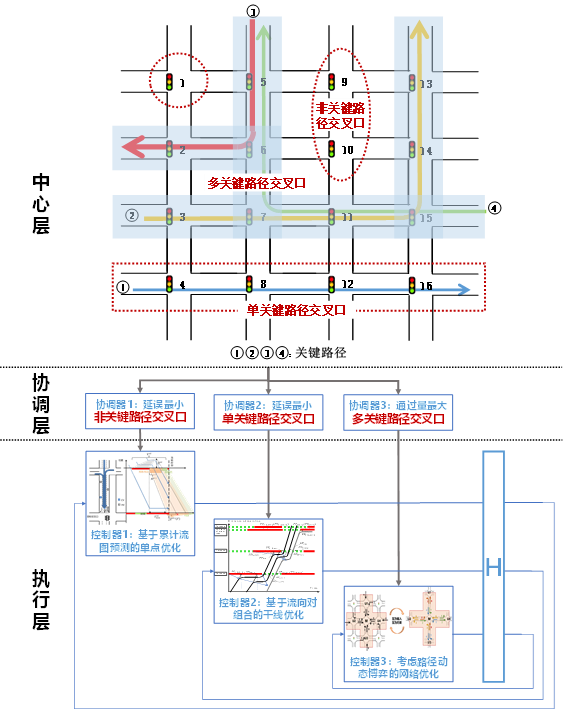
传统的系统调控以路段和节点为基本单元采用“划区分层”的基本思路,难以精确量化不同子系统之间的交互影响,存在“对象不精准、方案不精细、协同效率低”等问题。本研究方向采用“路径联动、车路协同”的核心思想,在个体连续检测的数据条件下,面向自动驾驶、网联自动驾驶、人工驾驶混合的新型异智车流环境,研究基于关键路径的信控优化、自动驾驶与人工驾驶车辆的车辆路径规划,智能网联车辆的路径动态分配、车辆路径分配与信号协同控制、面向交通拥堵疏解的路径级多系统供需协同调控、基于多智能体强化学习的分布式车路协同控制等方法,服务于端-边-云交通管控系统架构下的城市道路交通拥堵防治与协同调控。
相关支撑项目有:
国家自然科学基金委项目“基于关键路径的区域协调信号控制理论与方法”(52372319),2024年1月~2027年12月;
国家自然科学基金委员会-青年科学基金项目“面向分布式干线协调信号控制的多智能体博弈机制与自适应优化方法研究”(52302414),2024年1月~2026年12月;
