作者: Fen Wang, Keshuang Tang, Yanqing Xu, Jian Sun, and Keping Li
已见刊于:Transportation Research Record, vol. 2562, no. 1, Jan. 2016, pp. 53–62, doi:10.3141/2562-07.
在中国,交叉口无论限速值,通常会在每个相位的末尾时段应用3秒绿灯闪烁(绿闪)和3秒黄灯的信号灯显示方案。之前的研究表明,在相位末应用绿闪信号,特别是在行车速度较高的交叉口,可能会增加驾驶员对于走和停之间选择的不确定性。但是过去的研究通常只是探讨绿闪方案的有无对驾驶员走停选择行为的影响,研究范围限制于交叉口两难区域和驾驶员选择停车的概率,不考虑诸如急停和闯行等危险驾驶行为的概率,并且这些研究都建立在驾驶员只进行一次决策的基本假设之上。基于此,本文的研究主要提出了一个概率模型,以解释在城市高速交叉口的场景下相位末应用绿闪和黄灯信号显示时驾驶员动态驾驶行为选择过程。在研究中,不仅考虑了驾驶员进行多次决策的可能性,还研究了急停和闯行等危险驾驶行为的概率,并且研究了不同的绿闪和黄灯信号显示组合对危险驾驶行为的影响。
首先研究给出了5项行为假设,其中就包括驾驶员在绿闪变为黄灯时可能会改变其驾驶决策,即二次决策假设,在此基础上选择模型的输入参数,包括包括距离停车线的距离、绿闪开始时的瞬时速度、绿闪和黄灯显示方案(时间)、车辆加速度、减速度以及驾驶员感知反应时间。模型的输出是由蒙特卡洛仿真技术生成的以周期为单位的一系列危险驾驶行为的频率,如急停和加速通过交叉口。
模型主要由三个部分组成,整体结构如图1所示。包括在绿闪开始时的驾驶行为决策、黄灯启亮时的驾驶行为决策以及危险驾驶行为判断。绿闪开始和黄灯启亮时的驾驶行为决策包括执行加速、减速以及保持当前车速,最后根据停车位置距离停车线的距离或越过停车线的距离判断是否为正常停车(NS)、急刹车(AS)、正常通过(NC)、闯行(AC)等驾驶行为。
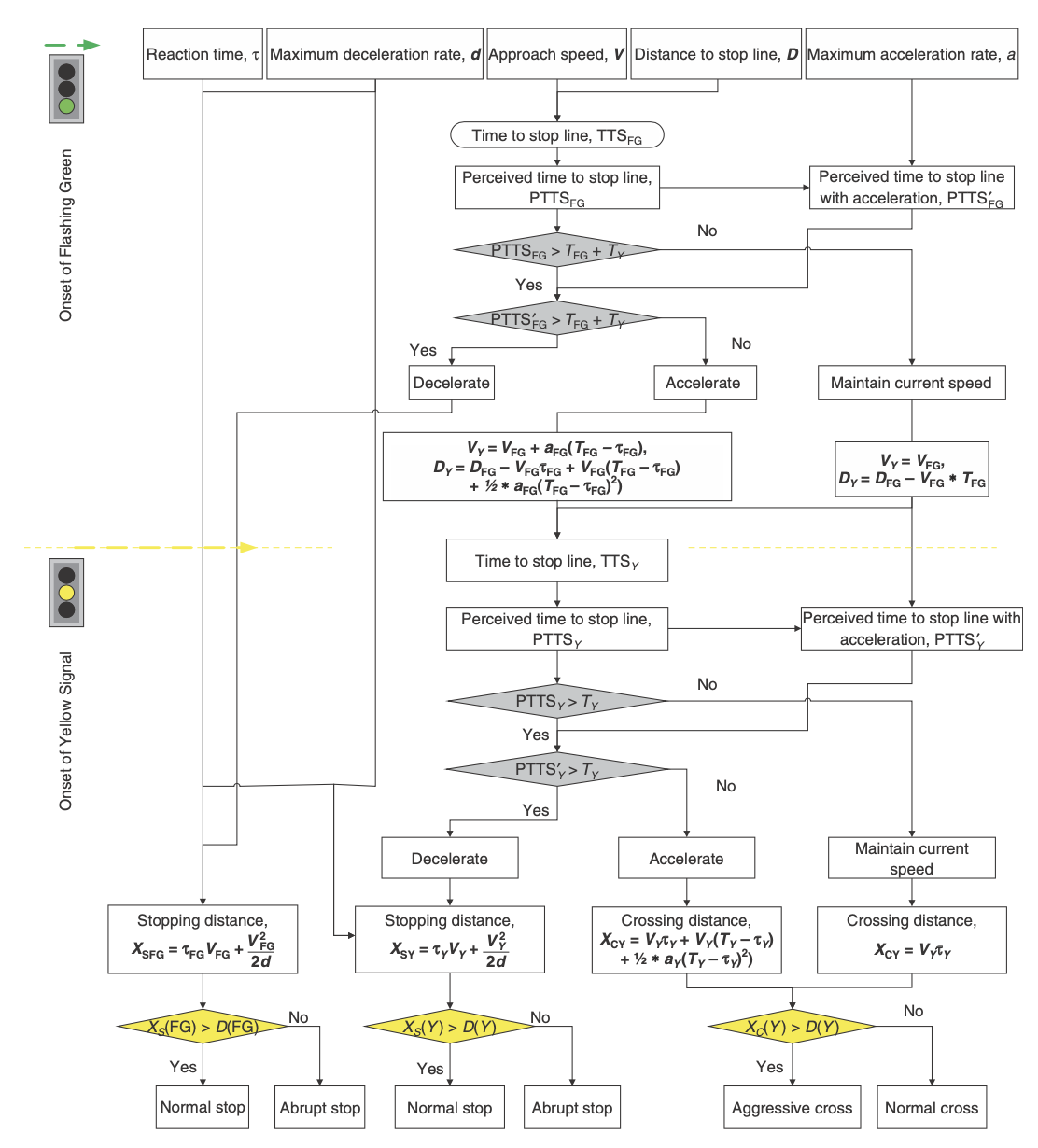
图 1 模型结构图
在模型验证中,使用了从中国上海市的三个限速值为80km的交叉口视频数据中提取的1186条车辆的轨迹,并且按照车型分为大车和小车。接着从这些轨迹中可以提取每条轨迹对应的模型的各项输入变量,并对输入变量做不确定性分析。根据不确定性分析的结果,在MATLAB中利用蒙特卡洛方法生成5000条轨迹进行数值模拟,用于校验模型的精度,结果如图2所示:
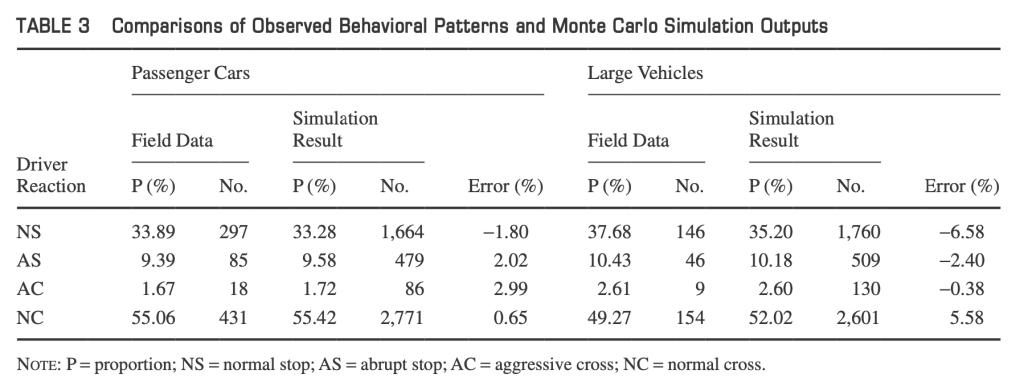
图 2 观测驾驶行为和蒙特卡洛仿真验证模型输出驾驶行为对比
实验结果证明,实际数据的驾驶员各种行为发生的频率和模型给出的频率的误差不超过10%,说明模型可以较好地模拟驾驶员各种危险驾驶行为发生的概率。再此基础上又进一步研究了不同的绿闪时长和黄灯时长组合的信号显示方案,分别是3秒绿闪+3秒黄灯、0秒绿闪+5秒黄灯、0秒绿闪+3秒黄灯三种信号灯显示方案,如图3所示。结果发现0秒绿闪+5秒黄灯的方案可以显著减少危险驾驶行为的频率(在限速80km/h的交叉口),因此推荐在有大量乘员车辆的高速交叉口使用该显示方案。
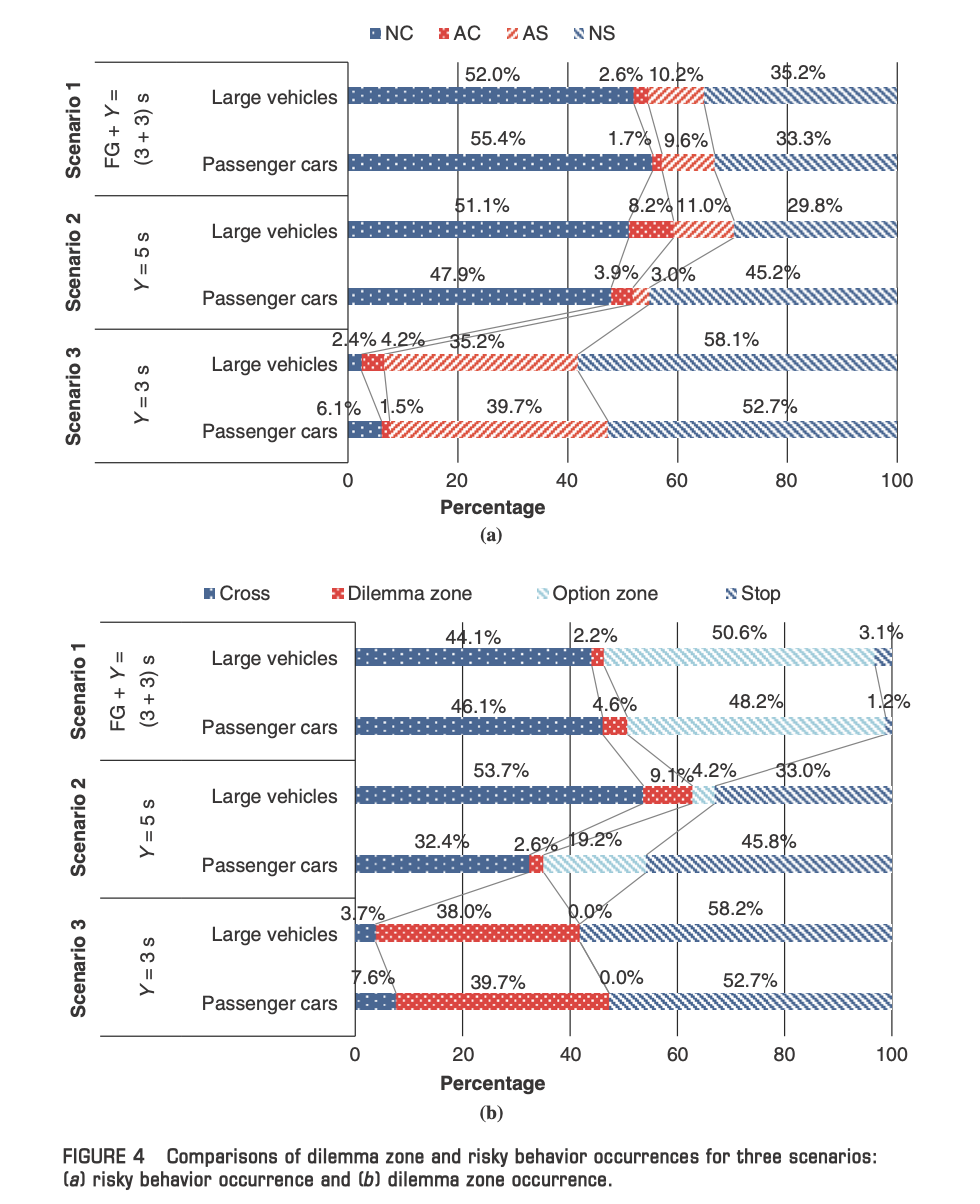
图 3 三种绿闪加黄灯显示方案对危险驾驶行为的影响

