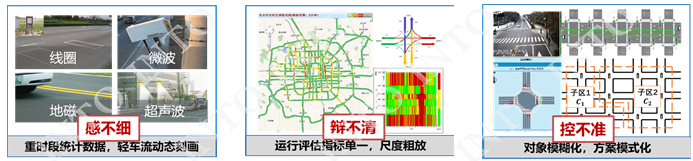
干线和区域协调信号控制作为城市交通协同管控的重要手段,可有效提升城市路网交通运行效率和缓解交通拥堵。现状的协调信号控制大都依赖线圈、地磁、视频等采集的断面集计流量、速度和密度信息,以主线优先的干线协调控制或基于子区的区域协调控制为主要形式。此类以路段为基本单元的断面集计信息感知和以子区为基本单元的协调信号控制方式无法精细刻画城市路网机动化出行的本源特征——车辆路径,因此难以适应时空分布动态变化的复杂交通需求场景。
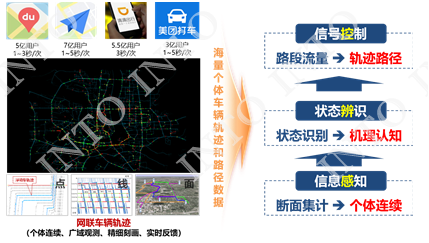
另一方面,近年来伴随移动互联网、智能网联汽车、高精定位等新技术的不断发展和应用,海量网联车辆轨迹数据的获取成为现实。网联车辆轨迹数据具有采样频率高、样本量大、广域覆盖、个体连续观测等优势,可以精细刻画车辆路径时空分布特征和交通状态演化过程,为协调信号控制理论方法创新提供了新机遇。然而,如何利用随机抽样的车辆轨迹数据实现路网全样交通流的运行参数可靠估计,并实施多尺度的协调信号控制建模与优化,依然面临诸多理论和方法上的挑战。
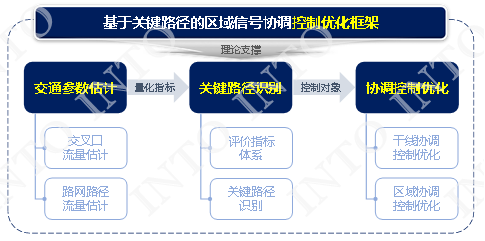
因此本研究针对上述科学问题和挑战,通过充分挖掘利用网联车辆轨迹数据蕴含的丰富交通流信息,构建基于关键路径的区域协调信号控制优化框架,并突破基于车辆轨迹数据的交叉口流量估计、路径流量估计、关键路径识别、干线协调控制优化、区域协调控制优化等核心理论方法,探索个体连续感知数据环境下新一代信号控制理论和方法,为基于车辆轨迹数据的新型信号控制系统研发提供理论和技术支撑。
本文的主要研究内容和成果如下:
(1)基于关键路径的区域协调信号控制优化框架。从交通管控角度定义路网关键路径的概念,提出基于关键路径的区域协调信号控制优化框架,以交叉口所属的关键路径为依据,将区域协调信号控制问题转化为非关键路径交叉口、单关键路径交叉口和多关键路径交叉口三类交叉口的信号控制优化子问题,并阐述控制优化框架的组成和原则及目标,为后续的干线和区域协调信号控制优化研究提供理论基础和顶层框架。
(2)基于车辆轨迹数据的交通状态估计与关键路径识别。基于抽样网联车辆轨迹的运行和分布特征,提出了基于交通波和概率分布拟合的融合方法以及基于奇异值阈值算法的数据驱动方法实现交叉口的流量估计,并以交叉口流量和路径流量估计误差最小化为目标,提出了基于广义最小二乘法的区域路网路径流量估计模型。在深圳和青岛道路网络的实证和仿真验证结果表明,交叉口流量和路网路径流量的估计精度分别可达95%和92%以上。

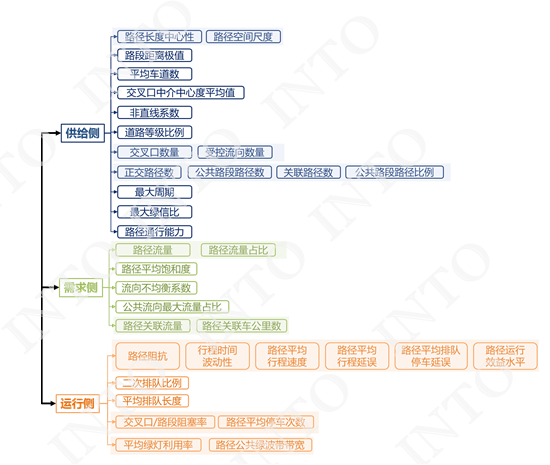
基于此,考虑路径的供给侧、需求侧和运行侧特征建立关键路径评价体系,提出了基于层次分析法的关键路径识别方法(Analytic Hierarchy Process-based Critical Path Identification Method ,AHP-CPIM)。在桐乡市路网的仿真验证结果显示,利用AHP-CPIM进行关键路径识别后的区域协调控制效果,相比于单纯使用Synchro或者MULTIBAND进行协调控制的优化方案,在全网车均延误方面分别提升了7.1%和28.7%,论证了AHP-CPIM的有效性。
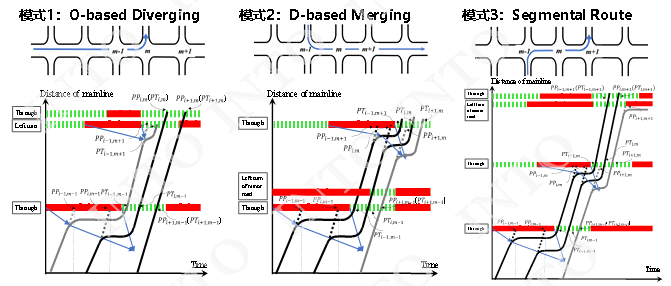
(3)基于车辆轨迹数据的干线协调信号控制优化。基于抽样车辆轨迹在不同相位差场景下的到达模式,提出基于抽样车辆轨迹数据的干线协调信号控制优化模型(Sampled TRajectory based artErial coordinAtion optimization,STREAM)。模型通过交通冲击波理论推导得到信控延误关于配时参数的解析式,基于不同的应用场景提出协调主线和协调多条关键路径两种变式,分别以主线抽样轨迹的总信控延误和干线范围抽样轨迹的信控延误最小化作为优化目标,通过多子群协同进化的粒子群优化算法求解。在连云港市朝阳东路的仿真验证结果显示,STREAM模型的表现介于Synchro模型和MULTIBAND模型之间:在主线双向需求主导的场景下,STREAM-MD模型的车均延误比Synchro改善了28.90%,比MULTIBAND增加了20.26%;在干线多路径场景下,STREAM-ND模型的车均延误比Synchro改善了12.60%,比MULTIBAND增加了15.12%。同时,STREAM模型表现出优于MULTIBAND和Synchro的鲁棒性和稳定性。
(4)多关键路径协同的区域协调信号控制优化。基于多路径冲突在交叉口所呈现出的控制效益相互关联特征,定义路径单元和全流向路径单元交叉口群作为区域协调控制的基本建模单元。由此提出基于基本单元自优化和自适应邻域搜索遍历的区域协调控制模型(PAth-based Coordination Control Optimization,PACCO),以路网总延误最小为目标,通过矩阵分块和交替方向乘子方法求解。同时,基于关键路径的定义和PACCO模型的最优配时输出,提出基于后评估的关键路径识别方法,从而同步实现区域协调控制和关键路径识别。在桐乡市路网的仿真验证结果显示,PACCO模型与Synchro模型在验证路网的区域协调优化效果相近,在车均延误方面比MULTIABND模型降低了23%。且PACCO模型在剖析区域协调控制在时空资源配置的内在驱动,以及多路径协调与路网协调效果之间的关系层面具有较好的可解释性。

本文的研究成果对于建立面向个体连续观测数据环境的交通系统建模和分析理论方法,完善和丰富新技术背景下交通状态精准感知与协同管控理论,研发基于车辆轨迹数据的新一代信号控制系统,具有重要的理论和实践意义。
答辩专家认为:论文面向移动感知数据环境下城市交通协同管控需求,针对网联车辆轨迹数据驱动的关键路径识别和信号控制优化展开研究,围绕随机抽样观测下路网状态可靠评估和全局优化这一关键科学问题,构建了基于关键路径的区域协调信号控制优化框架,及路径流量估计、关键路径识别和协调信号控制优化三个核心方法:(1)基于交通波重构、奇异值阈值算法和最小二乘模型的交通关键参数估计方法;(2)基于层次分析的关键路径识别方法;(3)考虑多关键路径博弈的干线与区域协调控制优化方法。论文对上述方法进行了仿真和实证评价,证实其有效性和优越性。
姚佳蓉同学在攻博期间,共发表学术论文12篇(第一作者3篇),其中SCI期刊10篇;以第二、三发明人(导师为第一发明人)获授权发明专利8项。导师唐克双教授主要研究方向为交通系统优化理论与方法,主攻数据驱动的交通管控优化、智能交通系统人机交互行为、“人工智能+交通”技术应用,欢迎对课题感兴趣的学者与企业进行合作交流。(联系方式:tang@tongji.edu.cn,课题组网页:https://into.tongji.edu.cn/)

