文章介绍:Dynamic Path Flow Estimation Using Automatic Vehicle Identification and Probe Vehicle Trajectory Data: A 3D Convolutional Neural Network Model
中文标题:融合车辆自动识别和浮动车轨迹数据的动态路径流量估计:一个3D卷积神经网络模型
作者: Can Chen , Yumin Cao , Keshuang Tang , and Keping Li
已见刊于:Journal of Advanced Transportation, Volume 2021, Article ID 8877138, 15 pages,DOI:https://doi.org/10.1155/2021/8877138
关键词:3D卷积神经网络、AVI、轨迹数据、数据融合
与静态路径流量相比,动态路径流量能够反映较短时间间隔内的实时路径流量信息,因此其在用户出行模式、大规模交通网络仿真、交通规划和管理等方面的应用更为广泛。考虑到路径观测方式有限,常见做法是通过已有的路段观测数据来间接预测路径流量。
与传统的路段交通计数数据相比,AVI数据和浮动车轨迹能够提供更多与用户行程相关的信息。AVI检测器能够记录每辆车的车牌ID和通行时间,通过匹配车牌,可以获得局部路径的交通计数和行程时间;而浮动车轨迹数据能够挖掘出先验OD矩阵和用户出行行为。这两种数据源在空间覆盖率和车辆渗透率方面性质互补。因此,融合这两种数据源来预测动态路径流量具有较大的潜力。
通常,动态路径流量预测会建模为一个优化问题。从数学建模角度,融合两种数据源获得的行程信息应该被描述为显式约束,但这会显著增大求解难度。考虑到AVI和浮动车轨迹数据隐含的丰富行程特征,可以把路径流量预测从优化问题转化为一个数据驱动的特征学习问题。
基于此,本文提出了一个3D卷积神经网络模型,融合AVI和浮动车轨迹数据,进行动态流量预测。方法主要包括以下三个步骤,见图1。1)从流向选取点位布设虚拟AVI检测器,将移动数据源转化为固定检测器数据。选址规则被表示为一个二元线性规划模型。2)采集基于虚拟AVI点位的三类观测数据:车辆转弯量、匹配量、匹配的行程时间作为输入层张量,构建3D-CNN模型。3)使用自主抽样法(bootstrapping method)对带误差的路径流量标签去噪,不断训练模型。
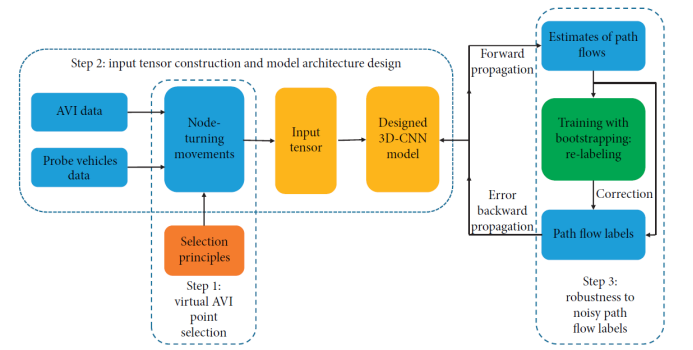
图1 建模框架
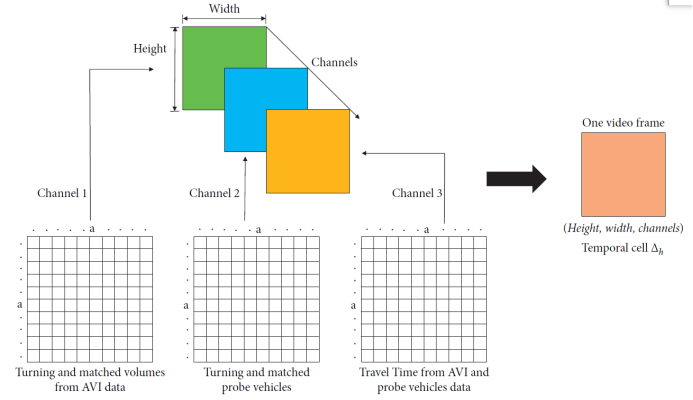
图2 3D-CNN模型的输入张量
研究算法在重庆市一个真实路网进行验证。网络拓扑结构如图3所示,共包含297个转弯点,真实AVI点位70个,占交叉口流向的31.5%。研究通过VISSIM微观交通仿真模型来构建初始数据集。
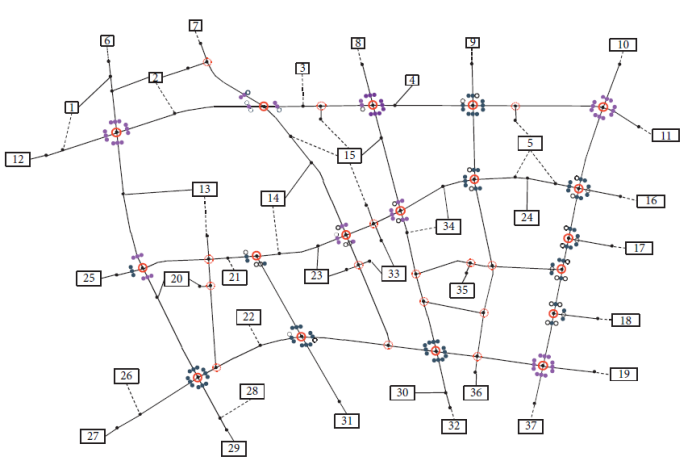
图 3 网络拓扑和真实AVI点位分布
本文采用平均绝对误差(mean absolute error, MAE)、相对MAE(%)、均方根误差(root mean square error, RMSE)和相对RMSE(%)来衡量模型精度。
测试1:验证流向选择算法(turning movements selection)。Model-A1作为对照组,输入层张量选取路网所有转弯点;Model-A2基于本文提出的线性规划模型进行选址。Model-A2的MAE达到1.88veh/10min,其计算时间和预测精度都有所提高,见图4。结果表明,虚拟AVI点位选择算法能够在保留路径的关键信息的同时,去除冗余信息。
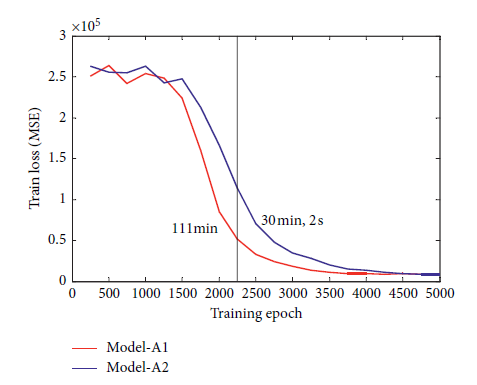
图4 测试1结果
测试2:验证bootstrapping method的去噪效果。路径流量标签被人为叠加了系统误差和随机误差,以测试模型的鲁棒性。结果显示,模型对含随机误差的标签不敏感,系统误差占主导地位。同时,bootstrapping method能够提高模型在不同错误标签百分率下的鲁棒性。
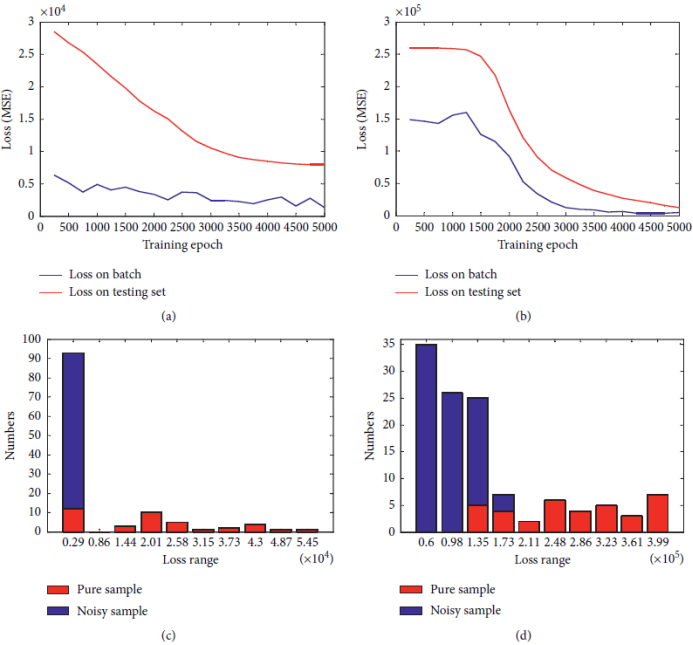
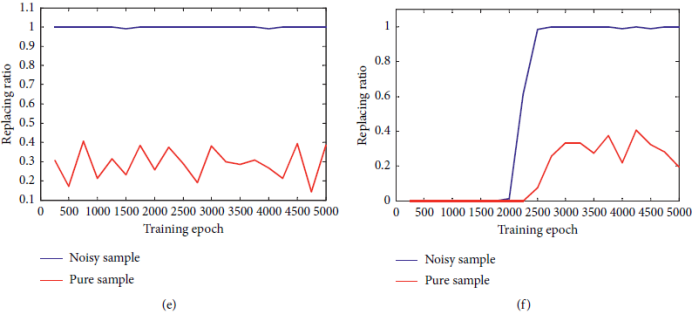
图5 测试2结果。(a)(c)(e)模型经过预训练,(b)(d)(f)模型未经过预训练

