作者:Keshuang Tang*, Shengfa Zhu, Yanqing Xu, and Fen Wang.
已见刊于:IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 1, pp. 206-214, Jan. 2016, doi: 10.1109/TITS.2015.2462738.
关键词:绿闪,高速交叉口,动态决策过程,隐马尔可夫模型
在中国许多城市的信号交叉口,通常采用闪烁的3秒绿灯时间和3秒黄灯时间来结束绿灯阶段。然而,3秒的黄灯时间对于司机来说通常太短,无法避开两难区(Dilemma Zone,DZ),尤其是限速通常在60km/h以上的信号交叉口。在信号交叉口,驾驶员在看到绿灯闪烁时需要更早地做出反应,并根据感知到的交通状况和观察到的信号状态做出停车决策行为。因此,由于交叉口相位切换时间、实时交通状况、车辆性能以及驾驶员特征的多样性,驾驶员的感知和反应过程可能变得非常复杂。
传统的驾驶员在绿灯时间结束时的停车决策行为研究通常都建立在驾驶员只进行一次决策的基本假设之上。当没有绿闪时间时,这种一次决策的假设很可能是正确的,因为通常黄灯时间可能不足以支撑决策的改变。然而,绿闪时间以及较长的相位间隔时间则显著增加了驾驶员第二次甚至第三次决策的可能性。因此,传统的建模方法很难解释相位间隔时间内驾驶员的这种多次决策和动态决策的过程。基于此北京,本文的研究主要提出了一种基于隐马尔可夫模型 (HMM)的方法,该方法能够在信号交叉口的相位间隔期间探索驾驶员的多次决策和动态决策过程。所提出模型中的隐藏状态是驾驶员是否停车或是否驶过交叉口的驾驶行为决策(无法在目标车辆通过交叉口或停在停止线之前直接观测得到),可观察状态是从高频率的车辆轨迹中提取的瞬时车辆速度和加速度/减速度(可揭示驾驶员的部分驾驶行为决策)。整体结构如图1所示:

图1 模型整体估计结构图
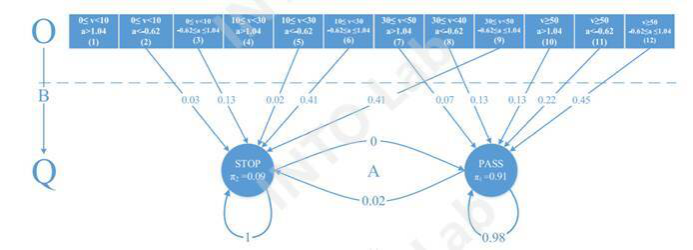
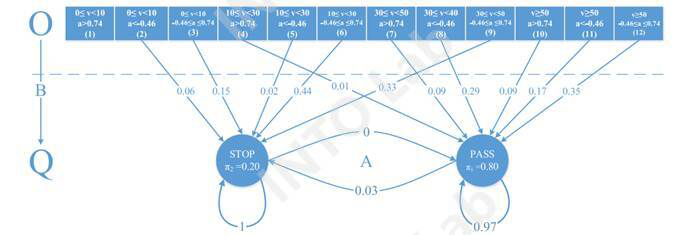
在模型验证中,本文使用了从中国上海市的三个限速值为80km/h的交叉口视频数据中提取的698条车辆的轨迹,其中包括179辆大车和519辆小车。同时,根据车辆的速度以及车辆的85分位的加减速度将车辆的行驶状态分为12类,如表1所示。此外,初始隐藏状态为停止或通过(即 π1 和 π2)的概率是根据停止或通过的车辆的实际数量来计算的。经过统计,小车的π1 = 0.91,π2 = 0.09;大车的π1 = 0.80,π2 = 0.20。
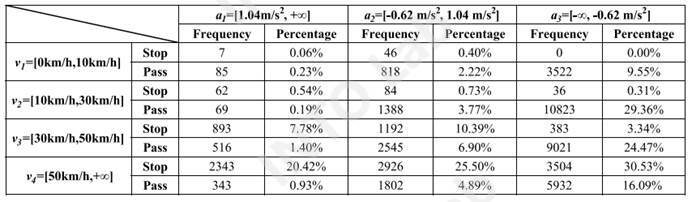
表1 车辆分类以及观测状态初始概率矩阵
实验结果证明,大小车的训练结果类似,如图2所示。其中,驾驶行为决策从“通过”决策转换到“停车”决策的转换概率极低(小车为2%,大车为3%),而从“停车”决策转换到“通过”决策的概率几乎为零。
(a) 小车
(b)大车
图2 训练结果
同时,为了验证该方法的有效性,该研究基于同一个数据源,建立了二元 logit 模型进行比较,结果如表2所示。可以发现,基于HMM的方法整体验证精度大于 96%,这证明与传统建模方法相比,基于HMM的方法能够更好地解释驾驶员的决策过程。
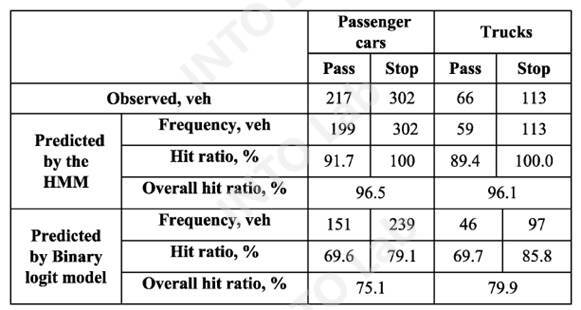
表2 基于HMM模型和传统二元Logit模型的估计结果对比
最后,该研究分析了每辆车的驾驶员的决策行为,并根据从绿闪开始,到最终停车或通过交叉口的时间内,驾驶员改变其决策的次数,将驾驶员分为了5种类型:(a) 一次决策过程(“通过”交叉口);(b) 一次决策过程(“停车”);(c) 两次决策过程(“通过”-“停车”);(d) 两次决策过程( “停车”- “通过”);(e) 多次决策过程。
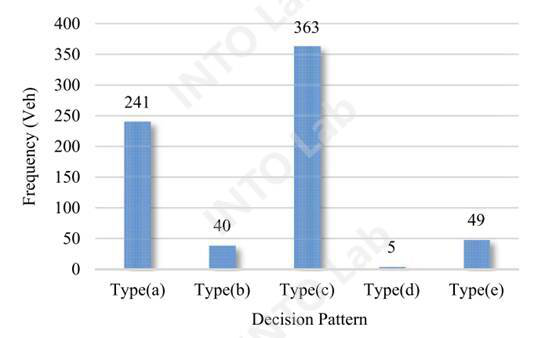
图3 基于HMM的每种驾驶员类型的估计频率
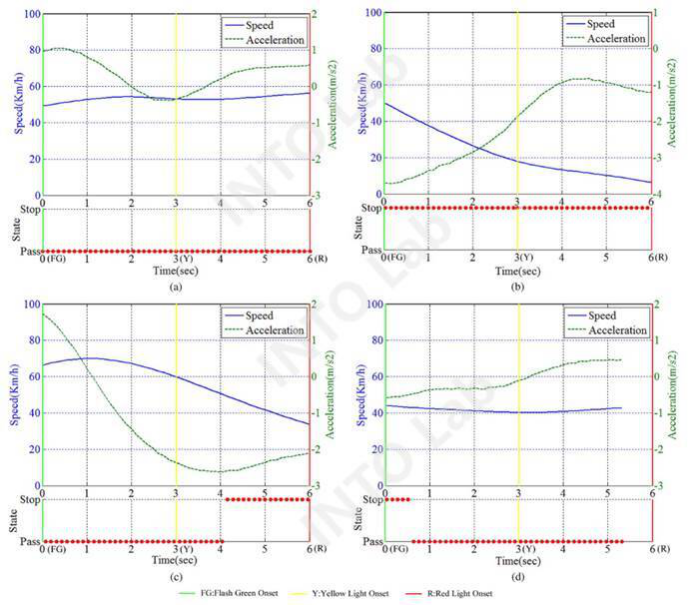
图4 类型(a)∼(d)的典型速度和加速度曲线
该研究中提出的模型可以扩展我们对交叉口相位变化时复杂驾驶员决策过程的理解,尤其是当相位过渡时间长且绿灯闪烁时。 同时,研究结果具有重要意义:(1)可以让交通工程师在遇到绿闪时主动识别驾驶员的潜在错误决策或危险行为,相应地开发替代对策;(2)研究结果表明超过 50% 的驾驶员采取两步或三步决策的结果,因此需要重新考虑信号相位过渡的传统设计方法;(3)驾驶员在相位过渡期间的这种多步骤的动态决策过程也需要对微观交通仿真模型进行修改。

