混合交通是我国城市道路交通的典型特征,混合交通场景中存在着复杂多变的交互行为,使得交通个体的运动轨迹呈现出复杂的不规则特性,对交通安全和运行效率均产生很大的影响。经典微观仿真模型及系统大多建立在描述沿车道纵向运动的车辆交通模型的基础上,简化甚至忽略了交通个体的横向偏移运动,因此难以描述交通个体在道路环境中的真实运动特征。所以,现有微观仿真模型在交通安全分析和混合交通流场景应用中存在较大的局限性。此外,当下热点研究的智能网联及自动驾驶技术对高精度精细化的环境背景模拟具有更高的要求,模型的虚拟验证需求也要求微观仿真模型的革新与发展。新一代道路交通仿真模型应向精细化、深度化的方向发展,为分析、测试以及优化未来交通系统安全和效率奠定仿真基础。同时,仿真模型应基于更加通用的底层结构,提高仿真模型普适性,以便未来能够融入智能车路协同系统、人工智能算法以及体现复杂交互场景的新型交通仿真模型,甚至是实现高等级车辆自动驾驶模型的仿真测试。
论文工作中详细分析了跟车模型的发展和其代表性的经典模型的适用性和用于混合交通行为分析的缺陷,特别是分析了元胞自动机的起源、定义、和其只适用于简单的中观模型粒度分析的要求,对于要求高精度模型分析的混合交通场合以及需要分析交通安全特征的场合,就完全无法使用的结论;在此基础上提出了新型时空离散深度微观仿真的思路和具体的空间数据模型结构,和道路空间、车辆、行人等要素的网格化表达,以及其驱动模式;采用实际数据,分析了交叉口右转车辆与行人的交互关系,得出了五类不同的交互行为模型,选择其中的交互行为作为案例,尝试性地进行了仿真测试,取得了初步的成果,证明了理论和方法的可行性。

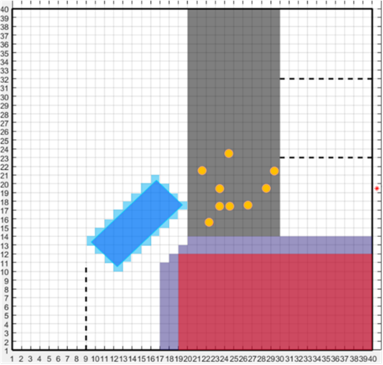
图1 案例交叉口场景交通要素的网格化表达
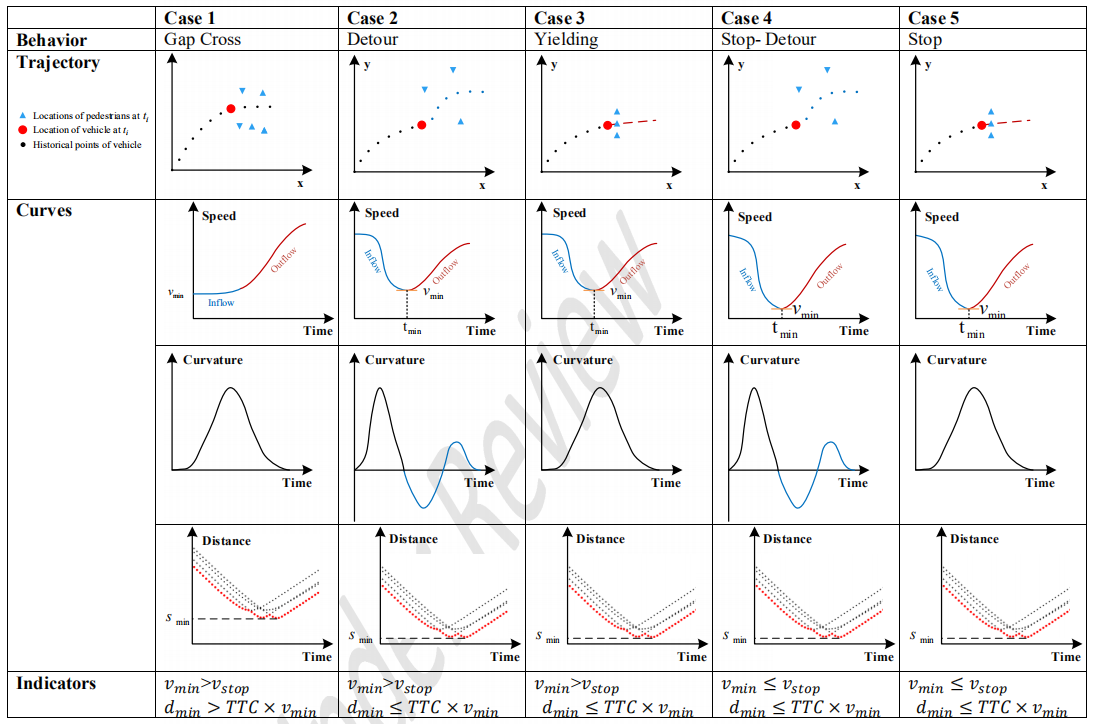
图2 交叉口右转车辆交互行为划分
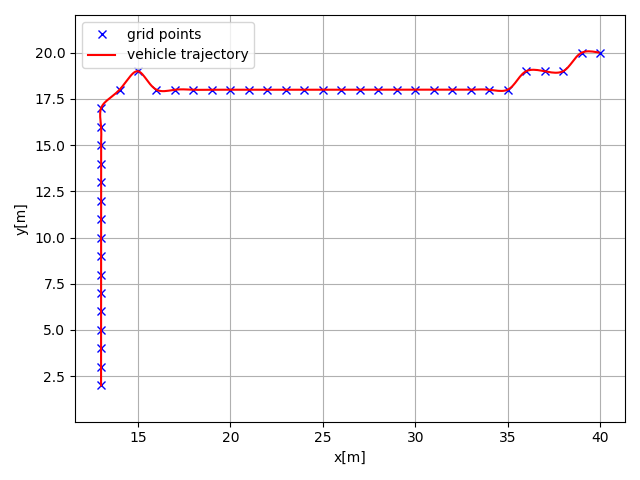
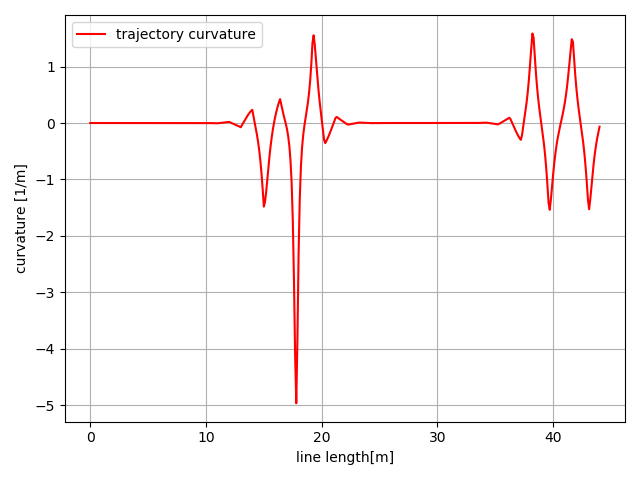
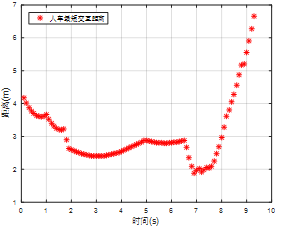
图3 停车绕行行为下的单车轨迹、曲率变化及最短人车交互距离的仿真测试结果
由于时间和条件所限,工作的深度和完整新,特别是面向未来的交通个体基于冲突分析、基于冲突避险监控机制的交互驱动方面,仅作了初步的基于实际数据的理论模型和简单的仿真实现,还未能做出更加深入具体的、更具有实际价值的突破。
答辩专家认为:论文针对道路交通行为的离散空间建模与仿真方法展开了研究,具有重要的理论意义和应用价值。论文提出了一种新型时空离散深度微观仿真的思路和空间数据模型结构,以及对道路空间、车辆、行人等要素的网格化表达方法和仿真驱动模式;采用实际数据,建立了交叉口右转车辆与行人交互行为模型,并进行了仿真测试,初步证明了理论和方法的可行性。本研究探索和发展了下一代微观交通仿真模型的构建方法,具有一定的创新性。
车雪琪同学在硕士期间,以第一作者发表IEEE-ITSC会议论文一篇,并且受邀参会作口头报告,以第二作者发表TRB论文两篇,均与硕士期间研究工作及学位论文密切相关。导师李克平教授主要研究方向为交叉口规划设计、交通控制、交通仿真、实验交通工程,欢迎对课题感兴趣的学者与企业进行合作交流。(联系方式:keping_li@vip.163.com,课题组网页:https://into.tongji.edu.cn/)

