混合交通流是我国城市道路交通的典型特征,交叉口更是一种典型场景,在交叉口内部,交通个体交互过程存在交通组成异质、优先权不明确、轨迹自由度高等特征,严重影响交叉口运行效率和安全。现有的微观交通仿真软件对于交叉口内部的模拟存在一定局限性。一方面由于它们是基于车道的结构化路网,在交叉口内存在一些空白区域无法被定义。另外机动车、非机动车和行人可运动的空间是独立的,同一类交通参与者和其他类型个体没有交互,弱化了时空精度和交互行为,难以高精度再现交通运行。
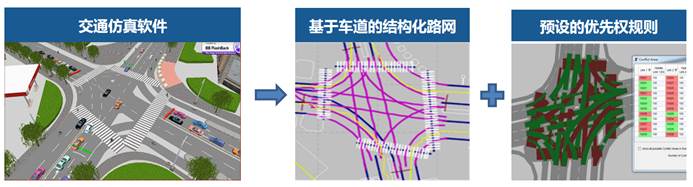
因此本研究希望在面向混合交通场景的微观仿真建模方法上做出一定的突破:第一,摆脱传统以车道为基础的路网仿真结构,建立深度离散化的空间路网;第二,建立交通参与者在交互过程中决策与运动的关联关系,并基于深度离散时空仿真模型思想,建立二维离散空间上的轨迹规划与车辆运动模型;第三,构建一个无信控交叉口的交互场景仿真系统,通过与实际驾驶人通过交叉口的驾驶行为进行定量对比,验证模型的有效性。
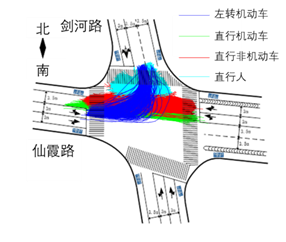
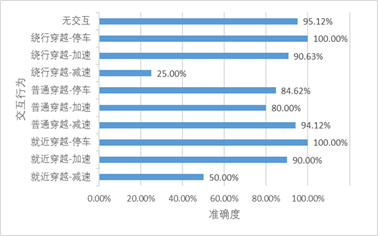
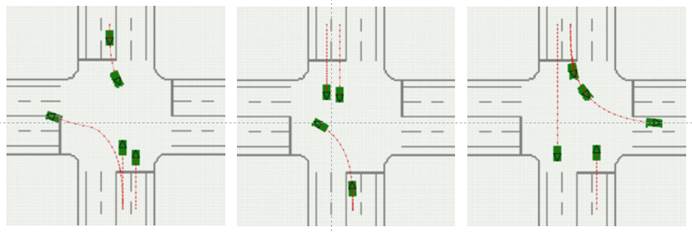
本研究选择左转与对向直行车辆交互的场景进行研究,分析基于真实的交叉口轨迹数据的直行与左转交互行为。通过研究车速、轨迹曲率和转向角这三个关键参数的动态变化特征,建立基于逻辑规则的行为分类模型来区分不同的交互行为,结果显示除了减速绕行和就近减速穿越行为外,模型分类结果的准确度均在80%以上。
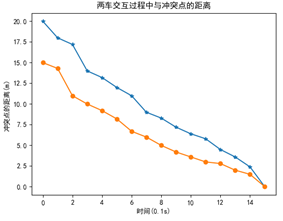
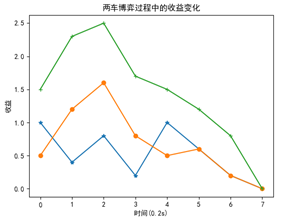
然后,采用博弈的方法对主体间车辆交互决策行为进行建模并进行机理解释。基于安全、效率和舒适性这三个层面的基础指标建立博弈的收益矩阵,求解车辆的最佳行驶策略,通过不断的更新车辆位置与交互信息,完成行程决策-规划的迭代过程。其中,决策模块确定车辆语义级运动意向,如绕行、就近穿越、停车等行为。规划模块确定未来一段时间内,车辆在交互过程中的运动轨迹。
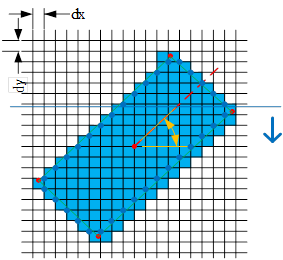
其次,考虑到轨迹规划在高维空间中难以求解的问题,将轨迹规划问题解耦为路径规划与速度规划。路径规划是将搜索空间离散成0.1*0.1m的栅格,采用搜索算法生成可行路径,并且根据代价函数寻找最优的路径点。然后确定每个路径点上的速度和加速度可选集,计算相应的代价函数,选择最小代价的取值作为速度规划结果。
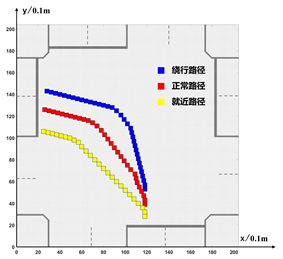
最后,为验证提出的路径规划与速度规划方法,基于双向四车道的无信号控制交叉口,分别对就近穿越,常规穿越和绕行穿越三种交互场景进行仿真验证。结果表明车轮转角变化程度较小、规划路径较为平滑,因此提出的路径规划方法能够根据博弈决策指令规划出符合车辆运动学的行驶路径。
同时,将左转车的表现与实际数据进行比较,分别通过行程时间分布,后侵入时间(Post-Encroachment Time, PET)的分布以及转弯轨迹的空间覆盖度来评价车辆的效率、安全性和轨迹准确性。仿真和实际数据经过z检验后小于95%置信系数,验证了行程时间没有显著差异;通过提前进行轨迹规划,仿真中PET值<2s远少于实际数据,规避了更加严重的冲突;模型的轨迹覆盖率为95.45%,能够模拟出绝大部分真实轨迹,接近真实场景。因此可以认为深度离散时空仿真模型能够再现交叉口内共享空间中复杂的直左交互行为,并且在二维离散空间上建立的轨迹规划与车辆运动模型可以生成安全、高效的行驶策略,改善无信号控制交叉口内的直左冲突问题。
答辩专家认为:论文针对智能网联环境下的交叉口交互行为建模与仿真研究展开了研究,选题具有重要的理论意义和应用价值。本研究基于交叉口的实际轨迹数据,分析得出直左车辆交互时的绕行穿越、常规穿越和就近穿越三种决策行为。另外,基于深度离散的底层路网结构,将底层数据模型结构、道路空间和交通参与者等要素网格化,建立一种深度离散的交叉口微观仿真框架。最后以无信号控制交叉口的直左交互行为为例进行测试,仿真模型结果接近真实场景。
张润涵同学在硕士期间,以第一作者发表TRB会议论文一篇,并且受邀参会作口头报告。导师李克平教授主要研究方向为交叉口规划设计、交通控制、交通仿真、实验交通工程,欢迎对课题感兴趣的学者与企业进行合作交流。(联系方式:keping_li@vip.163.com,课题组网页:https://into.tongji.edu.cn/)

