2020年5月12日,同济大学城市交通交叉学科在线上展开了第四次学术沙龙,主讲人为唐克双教授,沙龙参与人员包括校内校外的老师同学们以及企业的同行们,沙龙题目为基于车辆轨迹和路径的新一代城市交通管控理论与技术探讨。
学术沙龙首先从城市交通管控的机遇与变革展开,城市交通系统具有需求随机性、供给动态性、行为可变性、状态非线性等复杂特点,城市交通管控面对诸多技术挑战,沙龙从四个方面提到了目前城市交通管控的主要问题。
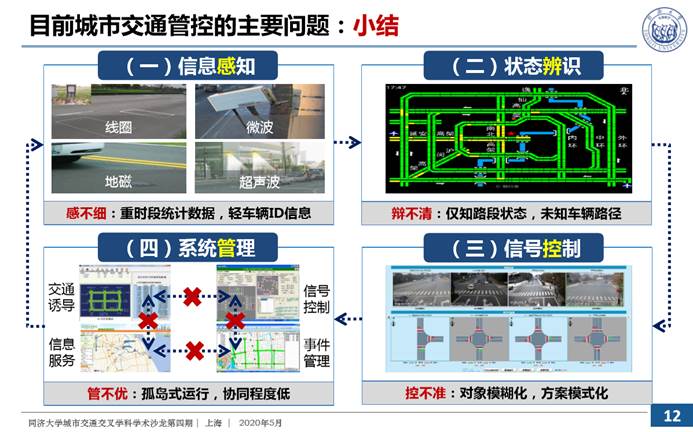
图:目前城市交通管控的主要问题
随后沙龙从新技术、新数据的角度分析了城市交通管控面临的新机遇。伴随移动互联网、智能网联汽车、自动车辆识别等新技术的持续发展和深入应用,城市路网全样本车辆轨迹和路径的获取成为可能,为应对城市交通管控技术挑战提供了新机遇。

图:城市交通管控的机遇
面对这些城市交通管控技术的挑战以及机遇,唐克双教授从四个方面提到了城市交通管控正在发生的深刻变革:信息感知从集计状态到个体状态,行为建模从断面数据到连续数据,系统分析从模型驱动到数据/知识驱动。

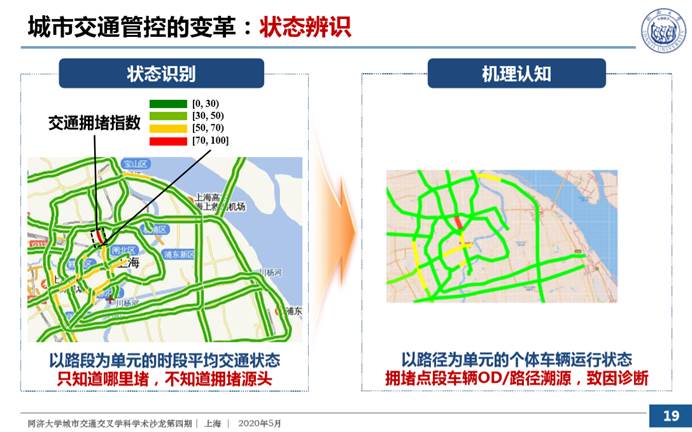


图:城市交通管控正在发生的深刻变革
接下来,唐克双教授从信息感知、状态辨识、信号控制和系统管理四个维度,探讨了基于车辆轨迹和路径的新一代城市交通管控理论与技术,并提出了六大关键技术。
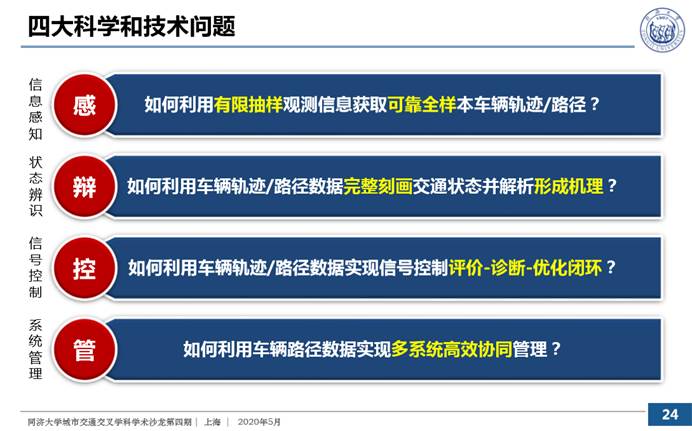
图:四大科学和技术问题
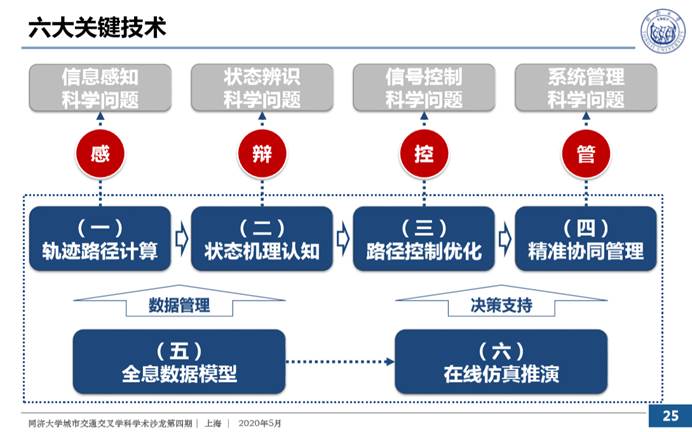
图:六大关键技术
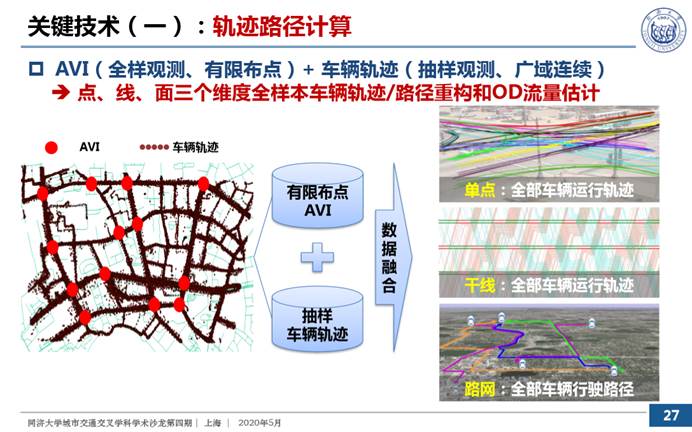
图:关键技术(一):轨迹路径计算

图:关键技术(二):状态机理认知
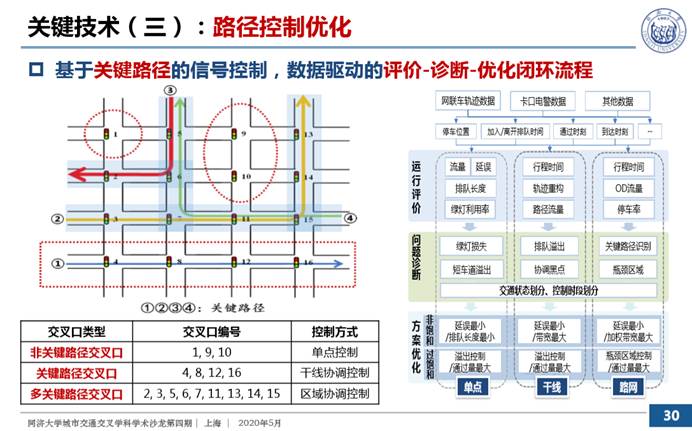
图:关键技术(三):路径控制优化

图:关键技术(四):精准协同管控
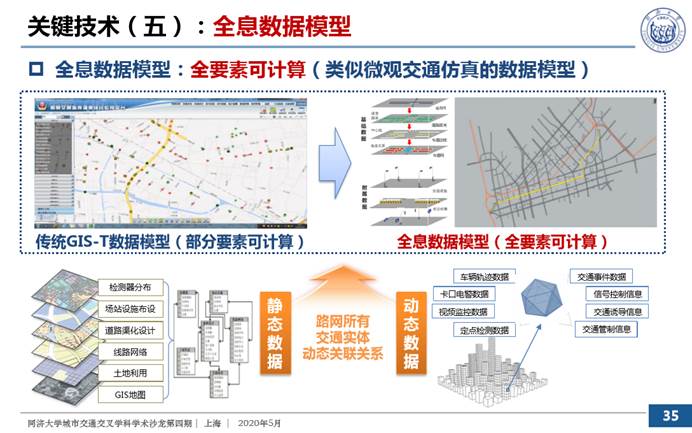
图:关键技术(五):全息数据模型
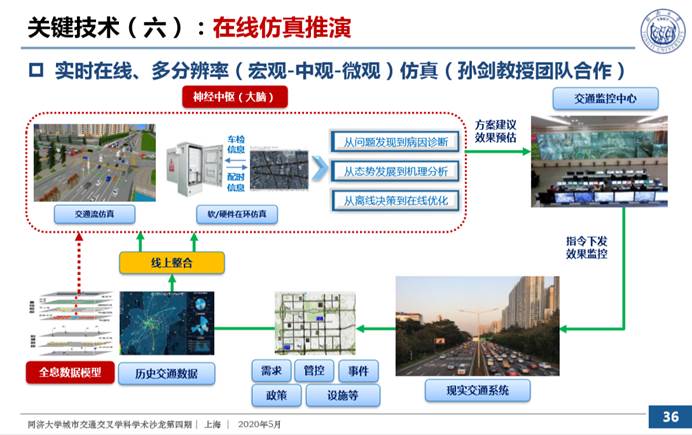
图:关键技术(六):在线仿真推演
接下来,唐克双教授分享了自己在该领域的研究探索和相关思考,并对其做了总结与展望。

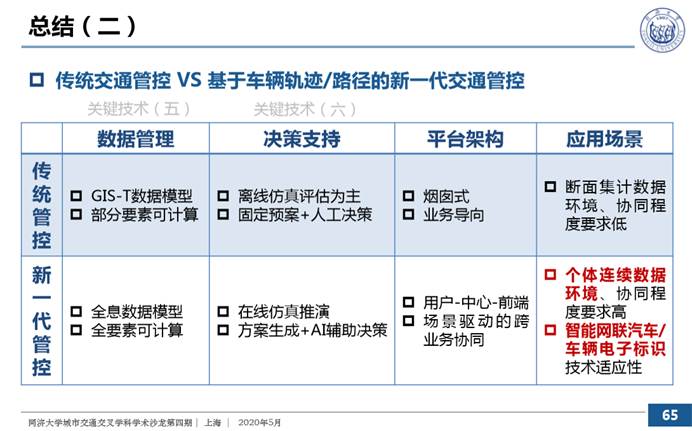
图:总结
最后,沙龙在热烈的讨论中结束,作为听众的我,也在激烈的交流和讨论中得到了新的思路和观点。

